3 月 27 日上午,小米系统性地公布了其在机器人灵巧手领域的解决方案,该方案在能完成拧螺丝、捏羽毛等高精度任务的同时,还通过了 15 万次抓握循环可靠性测试,展示了其在长期高强度作业中的稳定性。
其实今年从 2 月 5 日开始,小米就连续发布了一系列在机器人赛道上的新进展,先是精细抓取微调模型 TacRefineNet,随后推出首代机器人 VLA 模型 Xiaomi-Robotics-0,再到本月公布的机器人进厂作业和这套灵巧手解决方案。
这些连续动作背后也透露出了一个信号,小米正在尝试打造一条完整的机器人能力链条,即从感知控制算法,实体操作,再到落地可靠性的工程方案。
其中,在落地能力上,小米今天推出这套灵巧手解决方案主要围绕几个方向展开:
- 更高自由度的仿生结构
- 触觉手套
- 仿生汗腺散热系统
- 面向长期运行的可靠性设计
在这次小米灵巧手方案亮相中,雷军强调了一个重点:「希望通过不断的应用尝试,最终让机器人在工作站长时间部署中达成接近 100% 的作业成功率。」
值得一提的是,此前在小米公布的成果中,其机器人在汽车工厂自攻螺母上件工站上,已经做到 3 小时持续作业,双侧同时安装成功率达到 90.2%,并满足产线 76 秒的节拍。
对于机器人来说,灵巧手是价值最高的零部件之一,毕竟这也是其最重要的干活工具。不过要想造好一双灵巧手,难度不比直接造机器人本体要低,在去年年底,42 号电波也就此问题进行过详细探讨。

在灵巧手这么小的空间内,集成多电机、传感器、散热等零件,还要保证产品稳定可靠,绝非易事。这也是为什么,在过去一段时间里,很多灵巧手一旦进入真实工况,进行拧螺丝、装配等长时间的重复作业,能力往往很难稳定复现。
而这一次,小米把目标直接拉到了「接近 100% 作业成功率」,其实就是在把问题从「能不能做出来」变成「能不能长期稳定地做对」。
也正是在这个目标之下,这套灵巧手方案的重点,开始出现了一些值得单独拆开的变化。

为什么和人手一样大很重要?
在这次方案中,小米其实给了一个非常明确的判断,灵巧手需要尽可能做成 1:1 人手比例,并具备近似构型。
所以小米在此前灵巧手的基础上,压缩了约 60% 的体积,手的大小和 1 米 73 身高的男性差不多,另外还增加了 50% 自由度和 83% 主动自由度。

这并不是简单地在形状上要和人类保持一致,主要原因还是数据。
如果机器人的手和人手在尺寸、构型、驱动能力、可达空间等方面有明显不同,那即使你采集了大量人类操作数据,也可能会遇到「动作无法直接映射到机器人上」的问题。
就好比人可以伸进去的空间,机器人进不去,人可以完成的手指协同,机器人结构不支持,这就是典型的「同构问题」。
这些关键的能力全部对标人手,实际上就是要让机器人灵巧手和人手处在同一个操作物理空间里,在这种情况下,人类能做的操作,机器人更容易学会。

灵巧手也很需要触觉
小米在这次的灵巧手方案中,把触觉也提到了一个很高的地位,对此他们专门推出了「触觉手套」,实现包含指尖、指腹和掌心全掌触觉的同时,人类也可以穿戴触觉手套来直接采集操作数据。

对于人类来说,很多时候在干活的过程中并不需要一直用眼睛盯着,比如在拧螺丝的时候,先用眼睛确定大概位置,接着就可以主要用触觉感知来完成后续动作了。
甚至在很多情况下,即便看不到接触细节,人类依然可以完成操作。原因就在于手掌和手指,始终在持续提供接触反馈。
不过,如果只解决感知能力,其实还不够。小米在介绍中提到的另一个问题也很重要:「触觉数据的获取极度依赖低效的遥操作方式。」

也就是说,你可以做出有触觉的手,但很难获得足够的触觉操作数据。而没有数据,就很难让机器人真正学会如何利用这些触觉。
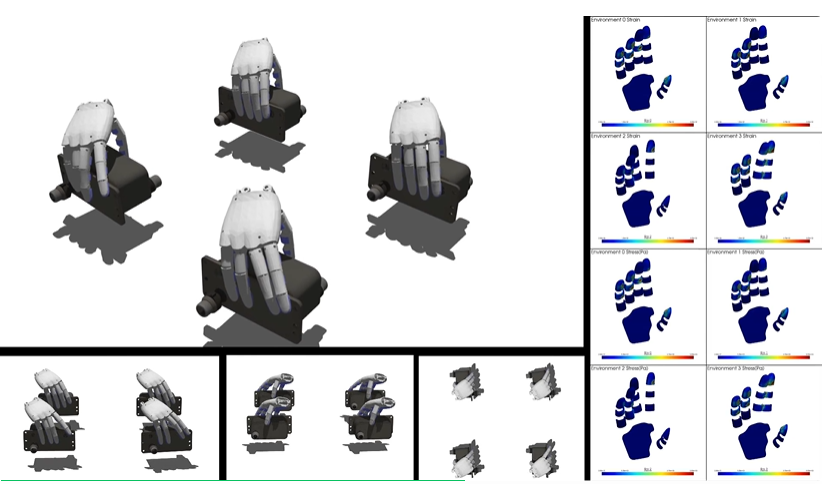
所以小米的做法是,让人直接佩戴带触觉手套进行操作,采集手部抓握动作等数据,而后在仿真环境中,尝试融合触觉信息,应用模仿及强化学习策略对大量数字零件进行学习和训练,直到生成接近拟人的抓握姿态。
和传统遥操作相比,这种方案不需要适应控制设备,人就是「标准答案」,不仅有动作,还有触觉信息,数据采集效率也有一定的提升。
更重要的是,结合前面提到的近似人手构型,人产生的数据,可以相对直接地映射到机器人上。

真正的门槛,是可靠性
前面提到的灵巧手构型和触觉,更多还是把动作做出来的问题,接下来要聊的「可靠性」,就真正决定了机器人能不能稳定在工厂作业。
小米也提到,要想达到人手自由度的水平,最大的问题就是硬件可靠性和散热。在这个过程中,很多灵巧手往往撑不过一万次重复作业,就会出现损坏,像腱绳、弹簧、套管等零部件,很容易出现失效的情况。
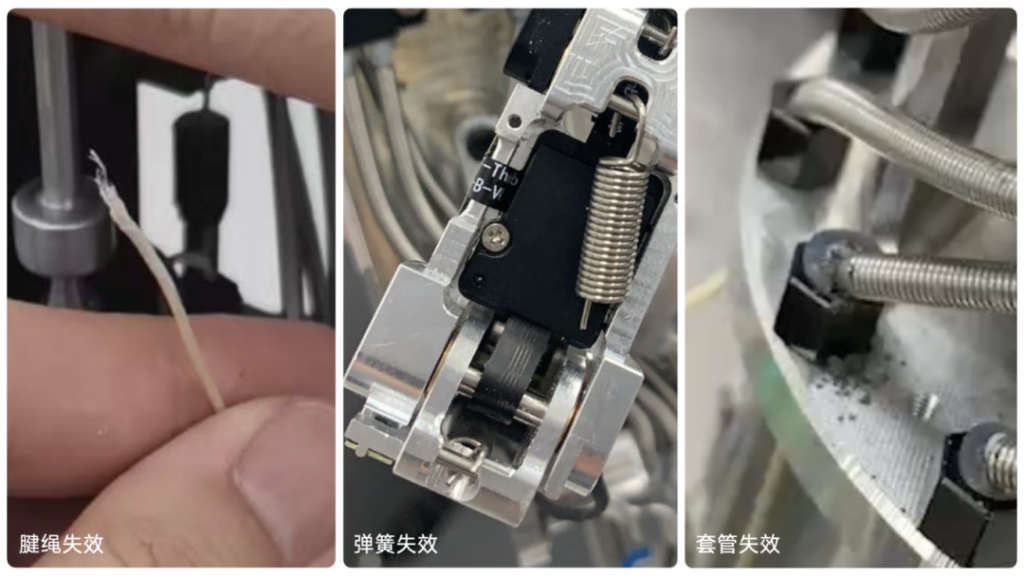
这也是很多灵巧手难以真实落地应用的关键,毕竟在一个极小空间里,零件做着高强度、长时间的重复运动,相应的磨损和开裂都是不好避免的情况。
对此小米的做法是,通过设计、仿真、测试不断迭代,针对实际操作场景,提升内部每一个零件的耐久性,经过一年的不断迭代,在实际抓握这样的重复操作中,灵巧手可以实现 15 万次以上的循环寿命和稳定的触觉数据获取。
不过在灵巧手落地中,还有一项关键问题,那就是散热。
很多人会觉得,温度高一点带来的问题就只是性能下降。其实不然,在灵巧手这种系统里,更多是连锁反应:
- 电机性能下降:温度升高、力矩输出下降、抓取不稳定。
- 传感器失准:触觉、力控等传感器对温度非常敏感,直接影响操作精度。
- 材料老化加速:高温会导致塑料件变形、润滑失效、结构疲劳加剧。
- 极端情况:热失控,尤其在卡住仍持续输出的情况下,热量会在极短时间内积累,直接导致系统损坏。
所以从落地角度看,散热问题,本质上就是可靠性问题。
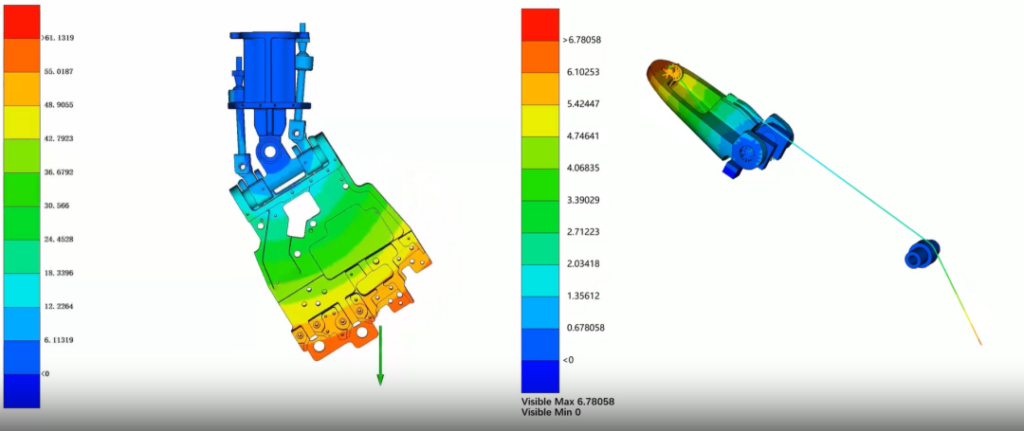
针对这个问题,小米引入了一套不一样的方案:「仿生汗腺系统」,模仿人类通过出汗蒸发带走热量。
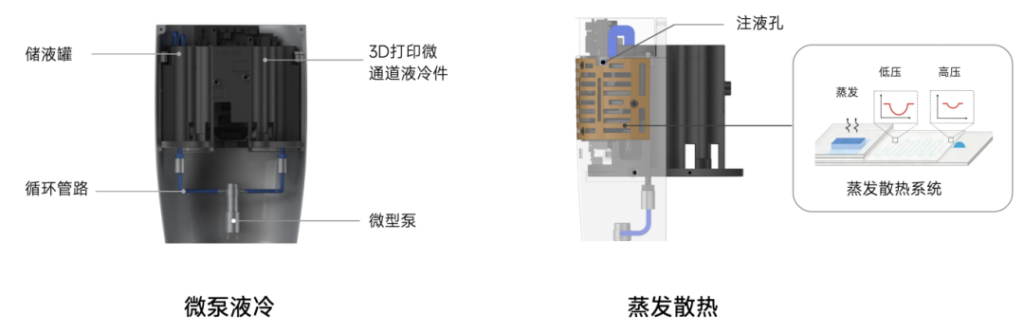
具体来看,小米在小臂结构中,采用采用金属 3D 打印制作液冷循环通道,通过微泵将电机热量转移至蒸发区,利用蒸发吸热快速降温。在实际测试中:
- 每分钟可蒸发约 0.5 ml 水
- 可提供约 10 瓦的主动散热能力
把散热做好,也就意味着灵巧手有了能力基础去应对「可持续工作」,尤其是在高负载、长时间、连续作业的真实场景中,这些差异会放得更大。

写在最后
在过去相当长一段时间里,灵巧手能不能像人一样动是更被关注的问题,但近一两年来,灵巧手能不能像人一样长期干活显然是大家更关注的问题。
从这个角度看,小米这次带来的灵巧手解决方案,重点还是围绕在了落地的方向,把构型、触觉、可靠性、散热这些关键问题一起补齐,这些也在一定程度上反映出了汽车厂商在机器人领域更重落地的底色。
对于机器人来说,灵巧手是最难做的硬件之一,但它能让机器人规模落地应用的价值也摆在那里,再难也必须克服。
所以当灵巧手开始逐渐跨过「可靠性」这道门槛后,很多过去只能停留在 Demo 里的能力,才有可能真正进入工厂,走进更复杂的真实环境中。