6 月 2 日,橡木果机器人发布「本能驱动」技术路线,从底层本能出发,让机器人先获取操作本能,继而在与物理世界的交互中自主涌现操作智能。
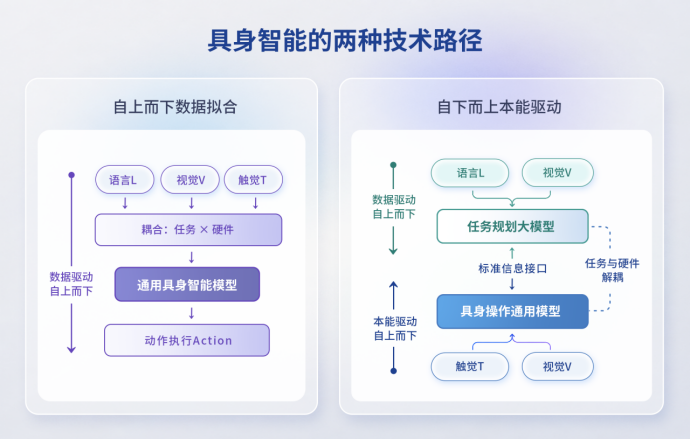
从行业视角看,目前具身智能领域多数公司选择的是「自上而下」的路径:用大模型理解任务,用海量数据训练端到端策略,试图让机器人模仿人类工作,而橡木果选择的路线则是「自下而上」。
对于人类来说,语言没有先天本能,人类出生后若不接触语言就学不会说话。但操作恰恰相反,人类抓取物体的行为高度一致,无论年龄、文化、环境。操作行为背后存在本能,出生即有、不受后天环境影响。
所以,这也是橡木果选择自下而上路径的关键原因。
具体来看,橡木果的技术路径是任务规划与操作执行解耦,自下而上构建通用操作模型。
任务规划层:负责知识推理、任务分解和全局规划。可通过自上而下的知识学习,其输出并非具体的电机电流指令或关节角度,而是关键图像帧和语义约束。例如,对于「把这杯水端到桌上,不要洒」的任务,规划层输出的是一系列「物体开始在哪」、「物体最终应该落在哪」的目标画面以及「不要洒」的约束,而非末端执行器的具体动作路径。
操作执行层:负责将任务规划指令在真实物理世界中精准、鲁棒地执行。这是橡木果重点研究层面,由具身本能出发,采用了自下而上、自主涌现操作智能的技术路线。
另外,橡木果构建了端侧自主决策模型 Natus,让机器人获得类人的操作本能,催生行为涌现。再依托真实物理世界中的探索与交互,不断熟练,最终构建第二个核心模型:通用操作技能模型 Magis,该模型的实现路径是利用 Natus 在真实物理世界中自主探索产生的、带有丰富精准触觉语义的数据,对视觉数据进行语义增强,然后训练技能模型。
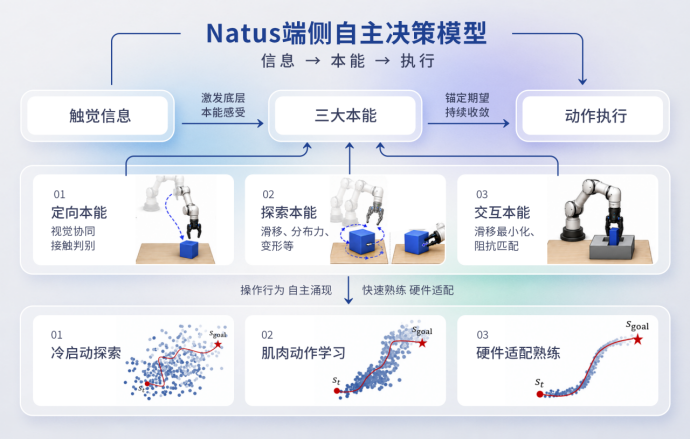
其中,Natus完全嵌在末端的执行器中,是一个由触觉刺激直接驱动的、毫秒级响应的端侧模型。它赋予了机器人三大本能:
定向本能:用于构建接触关系。与视觉协同,指引末端向目标物体移动。
探索本能:用于构建约束关系当末端接触物体后,该本能自动激活,它不预设任何动作,而是通过感知滑移、接触面积、分布力、形变等触觉信息,自主地沿着物体表面探索,寻找稳定的接触构型,不是通过预设程序,也不是通过模仿学习,而是由「建立稳定接触」这一本能催生出的自主行为(新策略)。
交互本能 (如抓握/装配):用于推进执行动作。当探索本能构建出稳定约束关系后,该本能自动激活,以「滑移最小化」或「阻抗匹配」为期望,自主地实时调节肌肉张力。如抓豆腐时增益调低(松),抓锤子时增益调高(紧)——所有调控均来自于触觉信息的实时反馈,无需任何训练数据。
Natus 赋予机器人的核心能力是零数据冷启动、硬件自适应和毫秒级响应。它不需要任何训练数据,不需要任何微调,依靠本能反射构建触觉感知与肌肉动作之间的映射关系,出厂即具备操作的本能,能够适应不同物体和工况的特点。进一步,可以在不断的探索过程中强化肌肉动作,形成肌肉记忆。
在橡木果的测试中,团队发现,机器人面对从未见过的各种不规则形态的物体,会沿其表面自主探索,实时调整抓取策略,直到建立稳定的接触构型后成功抓起。


面对一个倾倒了半瓶水的瓶子,它会反复试探重心,逐步调整抓力。

此外,Magis 的实现路径是利用Natus在真实物理世界中自主探索产生的、带有丰富精准触觉语义的数据,对视觉数据进行语义增强,然后训练技能模型。
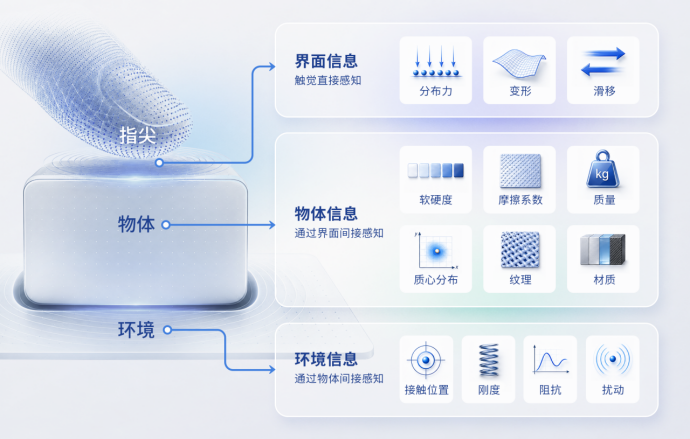
具体来说:当 Natus 驱动机器人在真实世界中完成一次成功操作时,它记录的不仅是成功了这一结果,更是一整套丰富的物理信息,物体的重量、质心的位置、表面的软硬与粗糙度、抓取时的力分布与滑移趋势等。这些由触觉直接感知并自动“打标”的力学语义,会被叠加对齐到视觉数据上,进一步被用于训练构建技能模型。
而在触觉层面,橡木果自研了视触觉传感器,该传感器采用弹性体(硅胶)加微型相机的方案,不依赖任何敏感材料,通过图像表征与重构算法将弹性体的变形反演为所需的多模态触觉信息。
据悉,其视触觉传感器已推出第三代成熟产品。
在商业化层面,据了解,橡木果机器人发力工业柔性生产场景(如消费电子、日化、新能源汽车、生物医药),目前已在某化妆品 ODM 厂商的产线上完成了 POC 验证,并实现商业营收。
值得一提的是,今年 3 月,橡木果机器人完成了近亿元种子轮融资,领投方包括钱唐材料实验室、普华资本等投资机构。
在行业多数公司选择发力「自上而下」技术路径的当下,橡木果机器人走的则是一条人迹罕至的「自下而上」的技术路径,当然,目前行业的技术路径远远没有收敛,到底哪条技术路径能走到最后还不得而知,我们且看橡木果机器人未来会给我们带来什么样的答案。