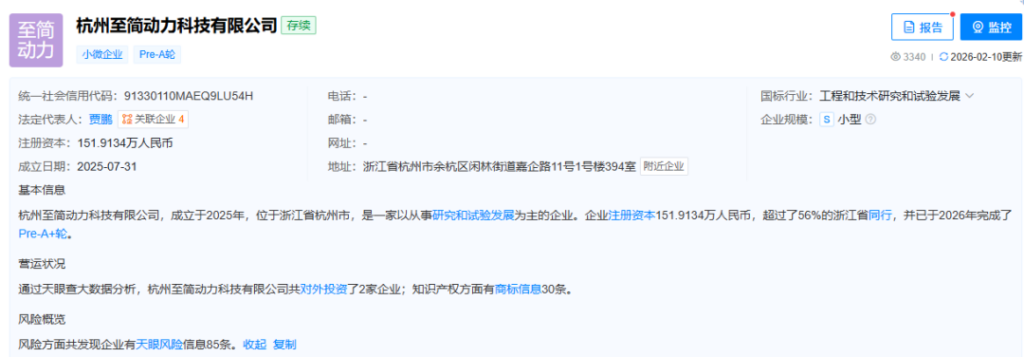
近日,具身智能企业至简动力官宣,在半年不到的时间内连续完成 5 轮融资,总融资额达 20 亿人民币,成为具身赛道内最年轻的独角兽。
融资阵容方面,财务投资机构包括:元璟资本、蓝驰创投、红杉中国、君联资本、中科创星、高榕创投;战略投资方则为腾讯和阿里巴巴集团。公司最新一轮融资由光源资本担任财务顾问。
此次募集的资金将全面投入训练基座模型、本体研发及迭代、数据采集、核心算法研发等领域,加速具身智能技术在多场景的规模化应用。
作为一家 2025 年 7 月底注册成立的公司,在此前半年里,公开渠道中并没有太多关于至简动力的相关新闻。
但其背后站着一支兼具全栈技术研发、大规模量产交付经验的核心创始团队,而这也是资本在半年内连续加注的关键逻辑。
公开资料显示,至简动力 CEO 贾鹏(下图)是前理想汽车智能驾驶技术研发负责人,董事长王凯是前理想汽车 CTO,COO 王佳佳是前理想汽车智驾量产负责人。
值得注意的是,该公司核心团队的汽车产业基因,也决定了至简动力的战略方向。在落地场景上,至简动力遵循从封闭到半开放再到全开放的渐进式迭代路径,率先布局工厂车间、商超、物流等封闭场景。
据悉,至简动力的第一代自研本体已小批量下线并开启 PoC 验证。
聚焦「量产、下工厂、干活儿」的核心场景,这也与当前资本对具身智能下半场规模交付的期待高度契合。
以真实场景落地为目的,在技术上,至简动力打造了世界模型与 VLA 一体化的模型,通过统一的 Transformer 实现语言逻辑、视觉语义、3D 空间结构以及机器人状态的联合建模理解及生成预测,在实现更高上限的模型架构的同时,减少人为设计。

截至目前,至简动力已经推出了:
- LaST₀ 基座模型:将世界模型对物理世界的理解、预测及 VLA 的快慢思维融合,提升对物理世界动态的高效推理能力,让机器人可以「边想边快速动」;
- ManualVLA 超长程任务模型:在 LaST₀ 基座的基础上,ManualVLA 在长程任务方面发力,使模型能够从目标状态出发,自动生成类似人类使用的多模态「操作说明书」,回答机器人「怎么想清楚再动手」的问题;
- TwinRL 真机强化学习框架:TwinRL 借助数字孪生扩展真机强化学习的探索空间,在多个任务上,机器人少于 20 分钟即可在桌面区域达到 100% 的成功率。
而在学习范式上,至简动力最近提出了一种 Human data is all you need 的机器人学习范式,并已验证适用于各种灵巧操作(包括夹爪和各灵巧手)。
在预训练阶段,通过人手高效采集海量操作数据,提升模型的泛化能力;在下游任务阶段,人类示范能够快速收集任务数据,扩展任务探索空间并提升执行精度;在后训练阶段,人类通过实时指导参与 post-training,使机器人能够实现高效的在线学习与持续能力提升。
同时,在端侧部署和预埋额外算力,通过影子模式,实现端侧训练和模型在用户场景下的测试验证。
通过这套范式,至简动力可以有效提高数据通用性、复用性,打造高效的数据收集、训练、测试验证、部署的闭环体系。