在当下的具身智能领域,人形机器人与四足机器人正在形成清晰的能力互补,人形更擅长站立姿态下的精细操作与上肢作业,四足则以全地形通过性和稳定移动见长。在矿山、井下、管廊、废墟、极地等人类难以长期作业的场景里,四足机器人的价值更突出,它能抵达绝大多数轮式设备无法通行的区域,也比双足人形更适合长距离、高负载、复杂地形的移动任务。
所以,四足机器人也成为了具身智能领域除了人形机器人外的又一大关键赛道。
在这样的背景下,4 月 10 日,智元酷拓召开媒体沟通会,正式发布全地形智能移动和作业平台战略,并推出新一代四足机器人产品体系。

智元酷拓依托智元集团的全栈 AGI 与具身智能技术,目标是让四足机器人更加智能,并重点面向物流搬运、工业巡检、安防应急、消防救援、特种作业等场景推进规模化落地。
智元酷拓董事、COO 兼营销服务总裁邱恒在会上提到,人类集中活动的空间只占地球不到 3%,剩下超过 97% 的少人、无人区域,都需要高通过性、高可靠性的智能移动平台。四足是自然界最普遍的运动形态,四轮则是工业装备里最成熟的移动方案,智元酷拓的四足机器人把两者结合,能适配多数极端地形与复杂工况。在智元的整体布局里,人形机器人与四足机器人形成覆盖,基本囊括了主流的智能移动机器形态。
据悉,和传统四足机器人相比,智元酷拓的产品不依赖预设指令、固定步态和人工遥控,而是具备自适应动态平衡、环境理解、自主任务规划、实时异常处理和自然语言交互能力,可以独立完成复杂作业。
其中的核心是酷拓深度复用智元集团的全栈技术体系:从硬件、动力、感知通信模块,到系统软件、运动控制算法,再到顶层具身智能、多模态大模型、世界模型、强化学习框架与场景数据,实现集团内部共享,而且在数据利用方面具备一定的优势,同时借助 Genie Studio 开发平台,提升模型训练和场景落地效率。
在此基础上,智元酷拓针对行业应用做了五方面增强:感知、导航、作业、交互以及上装生态,这也是其在落地应用时的关键不同。

在产品方面,目前智元酷拓产品包括 D1 Pro/Edu、D1 Max/Max Pro、D1 Ultra/Ultra W 等系列,覆盖物流搬运、工业巡检、安全巡逻、消防应急、文娱表演、教育科研等用途。
此外,会上还预告了下一代旗舰 D2 Max,定位为全地形 L3 级智驾四足机器人,地形自适应、精准落足、动态避障、自主导航与自主搬运能力将进一步提升,可在仓库、园区、管廊、工地完成巡检、转运、装卸等工作。
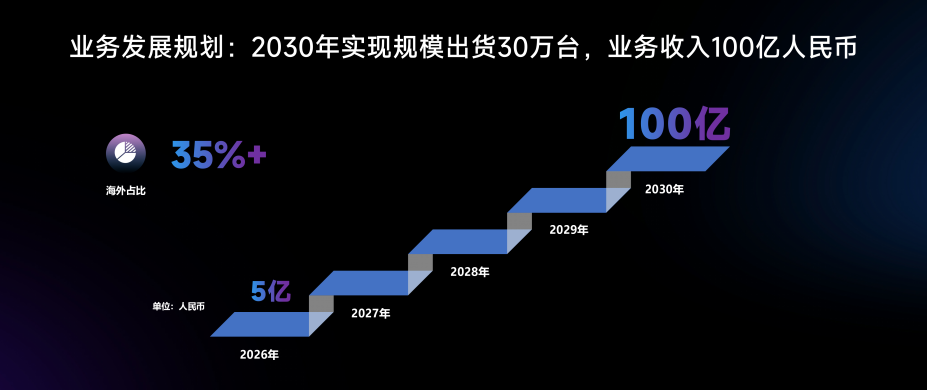
值得一提的是,在商业化层面,智元酷拓也给出了一个比较明确的目标:2030 年实现规模出货 30 万台、营收 100 亿元,海外收入占比超 35%。